Integração
Introdução
Quando estudamos o estudo das integrais em uma única variável, estamos normalmente nos referindo a um tipo específico de integral, chamada Integral de Riemann, nomeada em homenagem ao matemático alemão Bernhard Riemann.
Embora o conceito de uma função que nos fornecesse a área sob o gráfico de uma determinada função já existisse desde Newton e Leibnitz, o matemático ao lado foi o primeiro a fornecer uma definição verdadeiramente rigorosa para essa função, a partir de conceitos prévios na matemática, como limites e partições de conjuntos.

Riemann mostrando que ser matemático não implica em postura ruim. Domínio público, via Wikimedia Commons.
Riemann também é famoso por outras contribuções igualmente monumentais nos campos da análise real, análise complexa. geometria não-euclideana e muitos outros, pavimentando inclusive a matemática necessária para descrever a Relatividade Geral de Einstein. Ele também era bastante tímido e ficava doente com facilidade.
Dessa forma, para compreendermos a definição exposta por Riemann para esse importante objeto matemático, precisamos ter em mente alguns conceitos fundamentais, a saber, a partição de um intervalo e a soma de Riemann.
Partição de um intervalo
Definimos a partição de um intervalo da seguinte maneira:
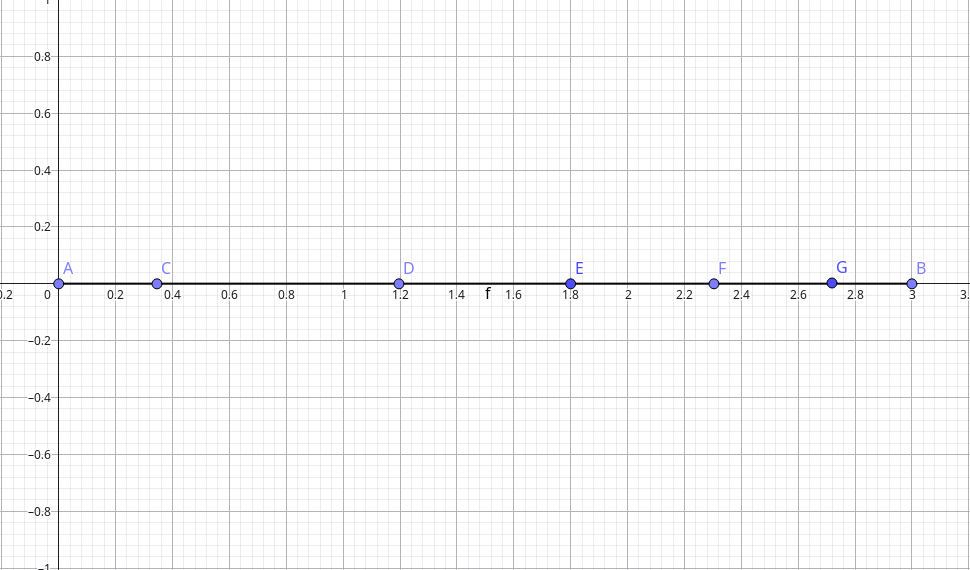
Um exemplo de partição do intervalo $[0,3].$
A partição de um intervalo o subdivide em $n$ subintervalos, com o tamanho do maior intervalo sendo chamado norma da partição $P$. Em termos mais restritos, podemos definir essa norma pela expressão
Com $i$ referindo-se a cada ponto na partição. No exemplo acima, a norma da partição seria a distância entre os pontos $\text{C}$ e $\text{D}$, ou seja, o tamanho do intervalo formado por esses pontos.
Soma de Riemann
A soma de Riemann é uma das maneiras de construir a integral de Riemann, talvez a mais conhecida. Definimos-a da seguinte maneira:
Exemplo visual do que está acontecendo ao definirmos uma soma de Riemann para uma determinada partição do domínio de uma função. Estamos calculando a área de diversos retângulos e aproximando a área sob o gráfico. GIF sob CC-BY-SA, via Wikimedia Commons.
Definindo integrais (de Riemann)
Por fim, chegamos à definição de integral chegada por Bernhard Riemann, que se utiliza dos conceitos expostos anteriormente, a soma de Riemann e a partição de um conjunto. Ela é definida da seguinte forma:
Ou seja, de forma mais palatável, uma função é integrável se, ao analisarmos todas as partições possíveis de seu domínio com normas cada vez menores (mais subintervalos), as somas de Riemann consideradas se aproximam do mesmo número, a mesma área sob o gráfico.
Por fim, escrevemos esse limite por uma notação resumida,
para nos referir à área $L$ sob o gráfico da função $f(x)$ entre os valores $a$ e $b$ do domínio.
Propriedades da integral
Dada essa definição inicial da integral, podemos encontrar algumas de suas propriedades, decorrentes do fato de que elas são, na verdade, limites.
Assim, dadas funções $f,g:[a,b] \rightarrow \mathbb{R}$ integráveis, temos que:
Além disso, temos que toda função contínua é integrável, embora algumas funções descontínuas preservem a propriedade de integração. Encontrar todas as condições que tornam uma função integrável está fora do escopo deste documento.
Calculando integrais
Até aqui, conseguimos definir integrais, operações que nos fornecem a área sob o gráfico de uma determinada função, mas não temos ainda um método eficiente de calculá-las: seguir a definição de Riemann seria um trabalho descomunalmente intensivo.
Dessa forma, vamos introduzir alguns conceitos, a saber os conceitos de primitivas e por fim o Teorema Fundamental do Cálculo, que irão nos ajudar a calcular integrais de maneiras um pouco mais rápidas.
Primitivas
Definimos primitivas, também conhecidas como antiderivadas, da seguinte maneira:
Uma consequência imediata dessa definição é a constatação de que se uma função $f$ possui uma primitiva, ela possui infinitas. Demonstrando essa afirmação:
Disso decorre a existência de infinitas primitivas para uma mesma função, diferindo entre si por apenas uma constante real. Dessa forma, podemos denotar o conjunto de todas as possíveis primitivas de $f$ por meio da notação a seguir.
Por fim, é importante ter em mente outro teorema importante, demonstrado no apêndice, cuja conclusão é que toda função contínua possuí primitiva.
Técnicas de integração
As primitivas — e as integrais de forma geral — possuem propriedades úteis que facilitam o seu cálculo, que por sua vez irá colaborar no cálculo de integrais, consequência exposta na próxima seção.
Mudança de variável
A propriedade da mudança de variável nos permite mudar a variável da função que está sendo integrada, permitindo uma maior facilidade. A ideia por trás dessa propriedade é uma espécie de “desfazimento” da regra da cadeia.
A seguir, usamos a definição exposta por Guidorizzi:
Por exemplo, na integração $\int_{2}^{3} (x-2)^8 \text{ dx}$, podemos substituir $u = x-2$ e, consequentemente, $du = dx$. Os limites de integração mudarão de acordo com a nova variável, com $x = 2 \rightarrow u = 0, x = 3 \rightarrow u = 1$.
Por fim, a integral se torna $\int_{0}^{1} u^8 \text{ du}$, tremendamente simplificando sua avaliação:
Por fim, qual o motivo da origem de $du = dx$, e como essa substituição funciona?
Nesse exemplo, definimos $u = g(x) = x-2$. Pela diferenciação, temos que $\dfrac{du}{dx} = \dfrac{d}{dx}(x-2) = 1 \rightarrow du = dx$. Curiosamente, isso não funcionaria, já que notações de derivadas são apenas notações, não "frações" de fato. Entretanto, isso pode ser provado de forma rigorosa, também.
Integração por partes
A integração por partes é uma maneira de “reverter” a regra do produto.
De fato, podemos provar a propriedade:
A demonstração é bem direta. Basta apenas encontrar a primitiva de $(fg)'$ e rearranjar os termos.
Um bom e simples exemplo para essa regra é a integral $\int x \cos{x} \text{ dx}$. Por meio da integração por partes, podemos definir $f(x)=x$ e $g'(x) = \cos{x}$. Aplicando a regra:
Com $k$ sendo a constante de integração, qualquer número real.
Integração por frações parciais
Podemos nos utilizar deste método quando precisamos integrar uma função racional $R(x)=\dfrac{P(x)}{Q(x)}$. A ideia é reescrever essa função como uma soma de frações mais simples cujos denominadores são fatores linear ou quadráticos do polinômio denominador.
Esse método possui duas restrições para sua utilização:
- $\text{grau}(P) \lt \text{grau}(Q)$, caso contrário, é recomendado executar a divisão de polinômios primeiro
- É possível fatorar $Q(x)$ em termos lineares ou quadráticos
Como podemos aplicá-lo? Primeiro fatoramos $Q(x)$, depois disso, montamos a igualdade
com $A_i$, $B_j$ e $C_j$ constantes que ainda não sabemos o valor, $r_i$ as raízes e os denominadores termos lineares ou quadráticos da fatoração de $Q(x)$. Depois, aplicamos a integral em cada termo de forma separada.
Por exemplo, como integrar a seguinte função racional?
Primeiro, fatoramos o polinômio denominador:
E reescrevemos a expressão:
Multiplicando ambos os lados por $x^2 + x - 2$:
Resolvendo para $A$ e $B$, chegamos em $A=\dfrac{5}{3}$ e $B=\dfrac{1}{3}$.
Substituindo na integral original, podemos resolvê-la:
Sólidos de revolução: volumes, áreas e comprimentos
Chamamos de sólido de revolução o sólido gerado pela rotação do gráfico de uma função em torno de um eixo (linha reta). Embora essa rotação seja possível para qualquer eixo, neste documento iremos tratar apenas dos eixos horizontais e verticais, em especial os cartesianos $(x=0; y=0)$.
Revolução em torno do eixo horizontal
Podemos calcular o volume desse sólido por meio de uma adaptação da expressão usual para uma integral, consequência da modificação da soma de Riemann para esse novo cenário: ao invés de somarmos infinitos retângulos, iremos somar infinitos cilindros, formados pela rotação desses “retangulinhos”.
Dessa forma, a integral $\int_a^b f(x) \text{ dx}$ se transforma em $\pi \int_a^b \cdot [f(x)]^2 \text{ dx}$. Essa é a expressão necessária para o cálculo do volume de qualquer sólido de revolução com rotação em torno do eixo x.
Se considerarmos outros eixos horizontais que não sejam o eixo das abscissas, podemos adaptar nossa integral para:
Com $y_R$ sendo a constante da reta horizontal, o eixo de rotação.
Revolução em torno do eixo vertical
Agora, se a função estiver sendo rotacionada entorno do eixo y, para calcular o volume desse sólido teremos que nos valer da chamada shell integration (”integração em concha”).

Ilustração da integração em concha. Note a revolução do gráfico em torno do eixo vertical, enquanto a integral calculada tem sua variável de integração no eixo perpendicular. Imagem por Blacklemon67, via Wikimedia Commons.
De forma mais geral, é um método utilizado para o cálculo do volume de um sólido de revolução quando os limites de integração estão no eixo perpendicular ao eixo de revolução.
Considerando uma integração no intervalo $[a,b]$ e $r(x)=x-x_R$, com $x_R$ a constante da reta vertical — o eixo de rotação — podemos escrever:
É importante mencionar que quando $r(x) = x$, temos o caso da revolução em torno do eixo $y$ do espaço cartesiano.
Perceba que um sólido de revolução possui uma superfície externa, uma “casca”, além da própria curva da função $f(x)$. Perguntas naturais a se fazer a partir desse fato são: é possível calcular a área dessas superfícies? É possível calcular o comprimento dessas linhas? A resposta, claro, é sim.
Apêndice A: Teorema do Valor Médio para Integrais
Podemos adaptar o teorema do valor médio (TVM), originalmente definido para a operação de derivação, para a integração.
Uma interessante interpretação geométrica é possível quando $\phi(x) = 1$.
Calcular essa última expressão é o equivalente de encontrar a área do retângulo com base no tamanho dos limites de integração e da altura $f(c)$, além de demonstrarmos que a área desse retângulo possui a mesma área que a integral da função.
Demonstração
Podemos demonstrar esse teorema da seguinte maneira:
Substituindo $int_{a}^{b} \phi(x) \text{ dx} = I$ por brevidade, encontramos:
Por fim, pelo teorema do valor intermediário regular, concluímos que $\exists c \in [a,b]$ tal que $f(c) = \dfrac{\int_{a}^{b}f(x) \cdot \phi(x) \text{ dx}}{I}$, logo, $\int_{a}^{b} f(x) \cdot \phi(x) \text{ dx} = f(c) \cdot \int_{a}^{b} \phi(x) \text{ dx}$, que era o que queríamos demonstrar.
Exemplo de utilização
Esta adaptação do TVM é útil na demonstração feita anteriormente, de que toda função contínua possui primitiva(s).
Seja $f: \mathbb{R} \rightarrow \mathbb{R}$ contínua. Tome $F(x) = \int_{a}^{x} f(t) \text{ dt}$ e $a \in D_f$.
Por meio do teorema do valor médio para integrais, podemos reescrever $\int_{x}^{x+h} f(t) \text{ dt} = f(c) \cdot h$, com $c \in [x, x+h]$.
Podemos afirmar essa última igualdade em razão da afirmação que $f$ é uma função contínua. Quando $h \rightarrow 0$, o intervalo se estreita e colocamos $c $ arbitrariamente próximo de $x$. Como $f$ é contínua, $\lim_{c \rightarrow x} f(c)=f(x)$. Dessa forma, $F'(x)=f(x)$, que era o que queríamos demonstrar.
Apêndice B: Primitivas de potências de trigonométricas
É possível encontrar algumas propriedades que facilitam o cálculo das primitivas de produtos de funções trigonométricas e em especial suas potências, inclusive por fórmulas de recorrência.
O primeiro caso notável é o da integral $\int \sin^n{x} \cdot \cos^m{x} \text{ dx}$.
Caso $n$ seja ímpar, um atalho rápido é substituir $u = \cos{x}$. Caso $m$ seja ímpar, um outro atalho é substituir $u=\sin{x}$. Se ambos forem pares, a decisão mais prática é rescrever
Além disso, temos o caso da integral $\int \sec^n{x} \tan^m{x} \text{ dx}$, que pode ser da maneira:
No primeiro caso de paridade, ainda é útil a substituição $u=\sec{x}$.
Fórmulas de recorrência
Abaixo estão listadas algumas expressões de recorrência para o cálculo das primitivas das potências de diversas funções trigonométricas.
Referências
- Playlist de cálculo diferencial e integral da USP — Coleção de aulas com o prof. Dr. Alexandre Lymberopoulos (Acesse aqui);